 F. L. I. G.
F. L. I. G.
Aside of watching the physical properties of the existing robots, I've paid attention to how amateur robots solve walking. Most of them use much simpler gait to move about. Instead of trying to balance over three legs - this gait does much simpler stuff: raising two opposite legs (for instance front left and back right) to move them forward, while deliberately pausing down other two legs (in this example front right and back left) down making robot going slightly up. That way only two legs are moving body to direction of movement while two legs travel to the new position.
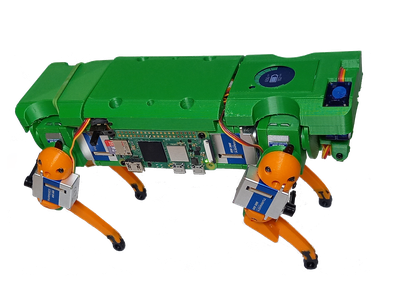
Here is Flig with new body and new way of walking:
Also, it seemed to be that plastic leg ends do not work well - they slip easily. As you can see on the video, I've used pieces of rubber band at the tips of the legs in order to make them less slippy.
But, it happens that I had plenty of various TPU materials from previous visits to TCT at NEC in Birmingham and 3D printer that can print two materials at the same time (CEL Robox). So, with some time with FreeCAD, I've split existing legs to two parts and printed them out:

Comments
Comments powered by Disqus