 F. L. I. G.
F. L. I. G.
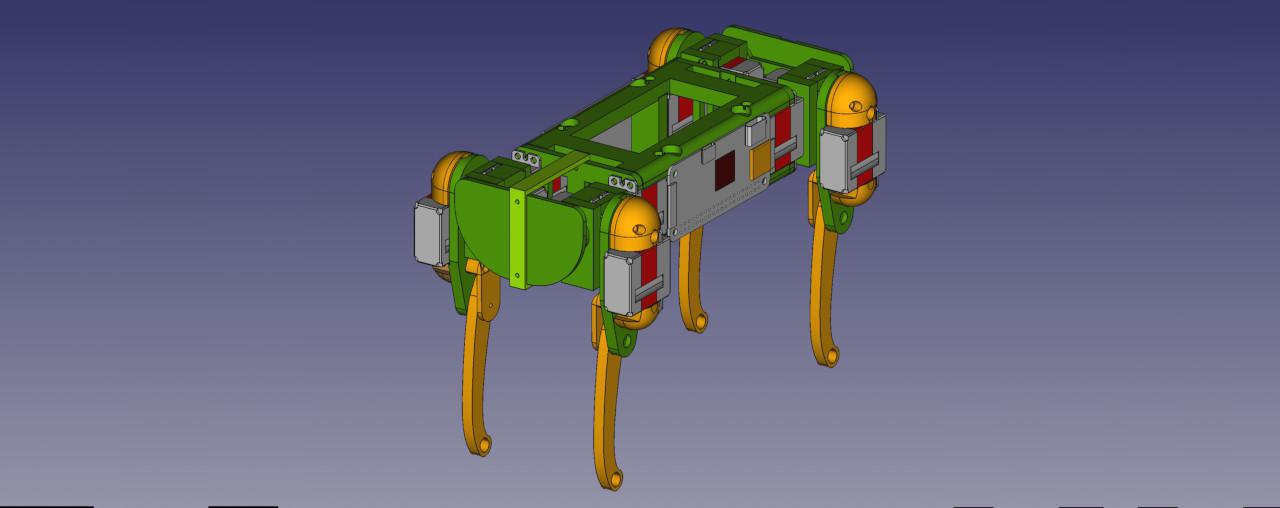
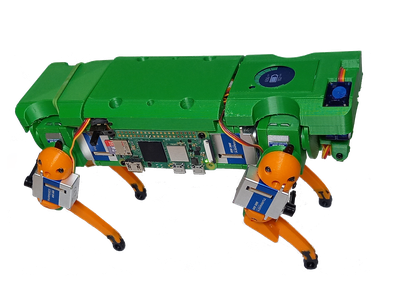
Trot Gait
Aside of watching the physical properties of the existing robots, I've paid attention to how amateur robots solve walking. Most of them use much simpler gait to move about. Instead of trying to balance over three legs - this gait does much simpler stuff: raising two opposite legs (for instance front left and back right) to move them forward, while deliberately pausing down other two legs (in this example front right and back left) down making robot going slightly up. That way only two legs are moving body to direction of movement while two legs travel to the new position.